Your browser is out-of-date!
For a richer surfing experience on our website, please update your browser. Update my browser now!
For a richer surfing experience on our website, please update your browser. Update my browser now!
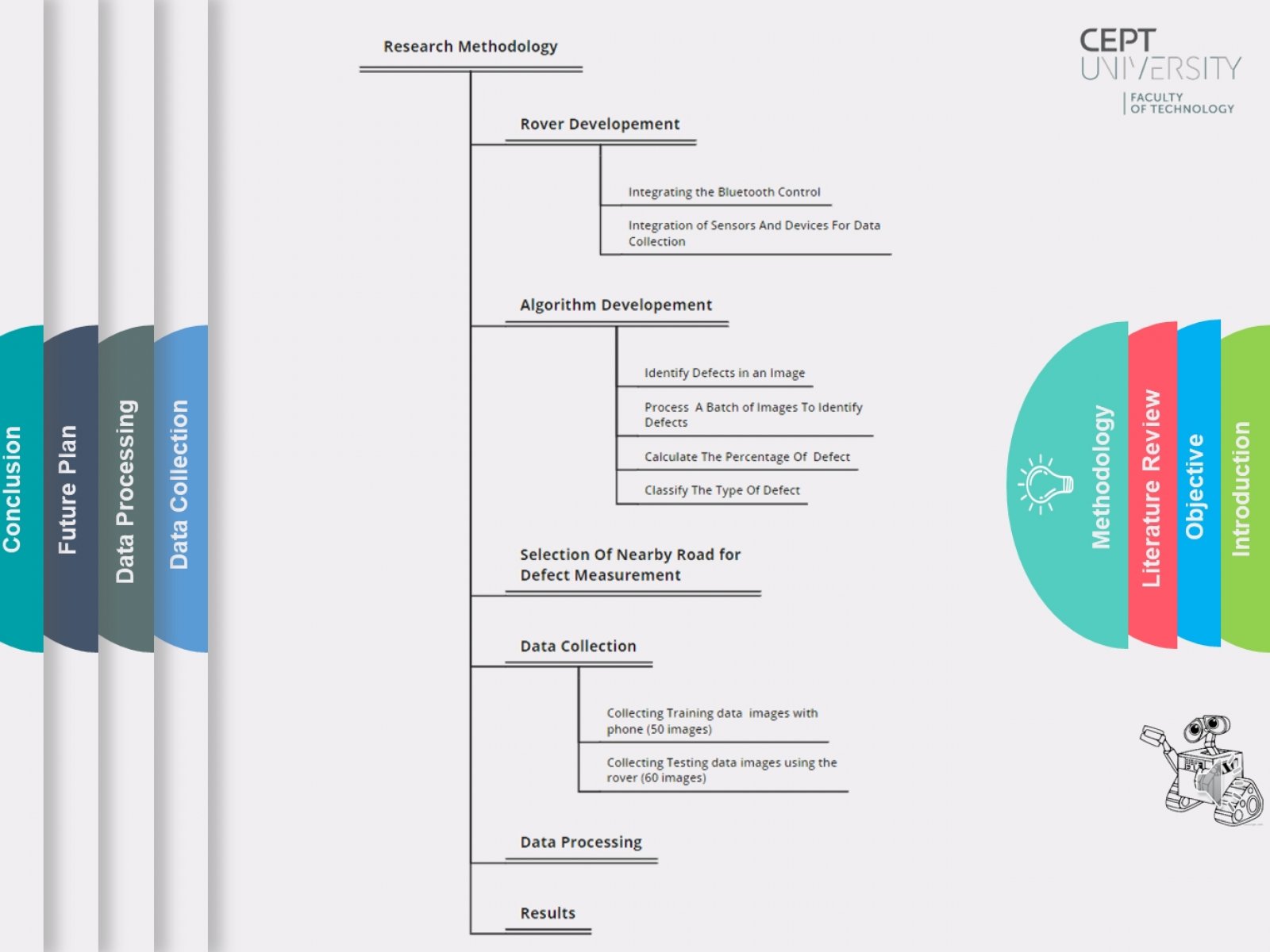
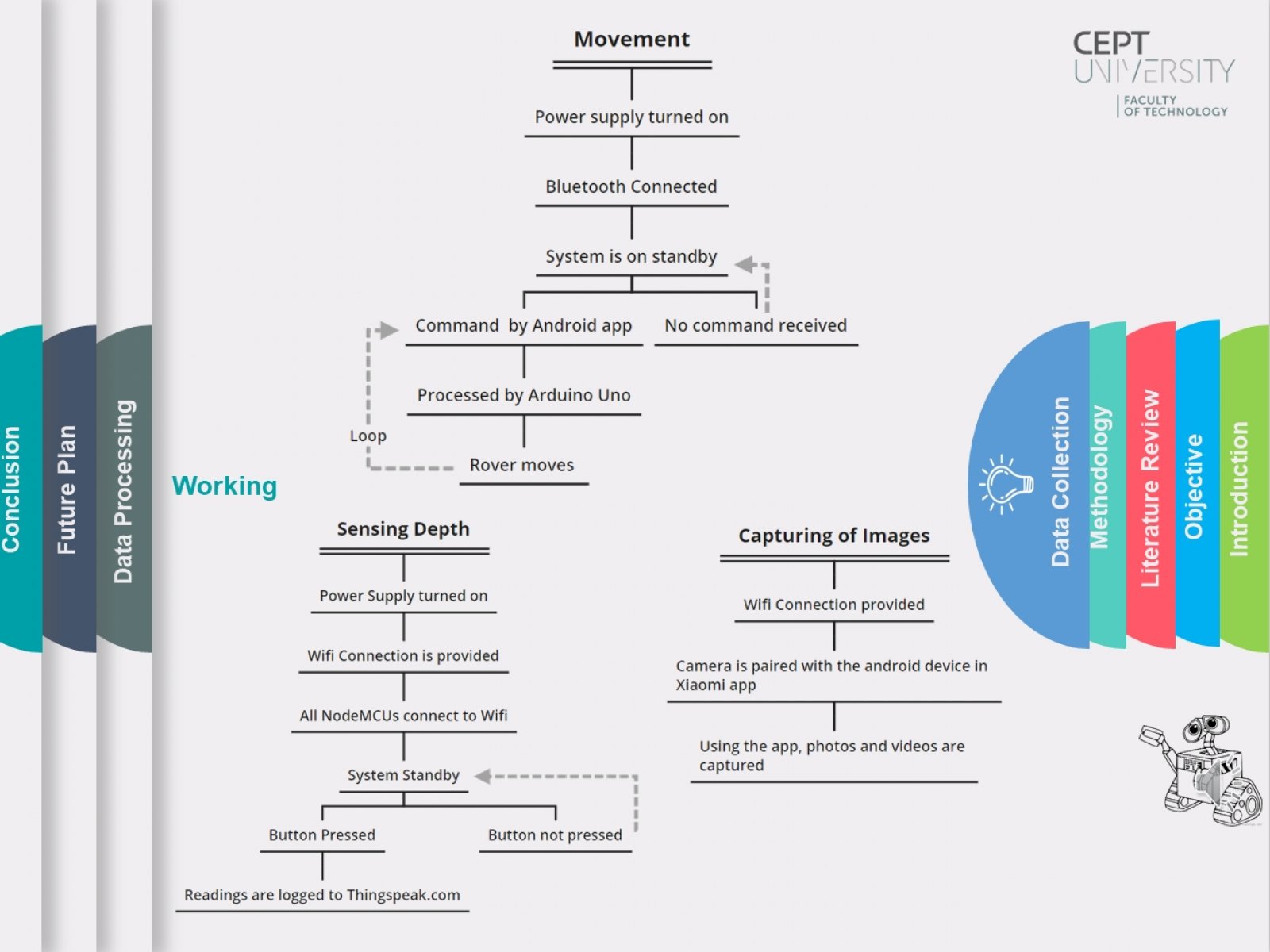
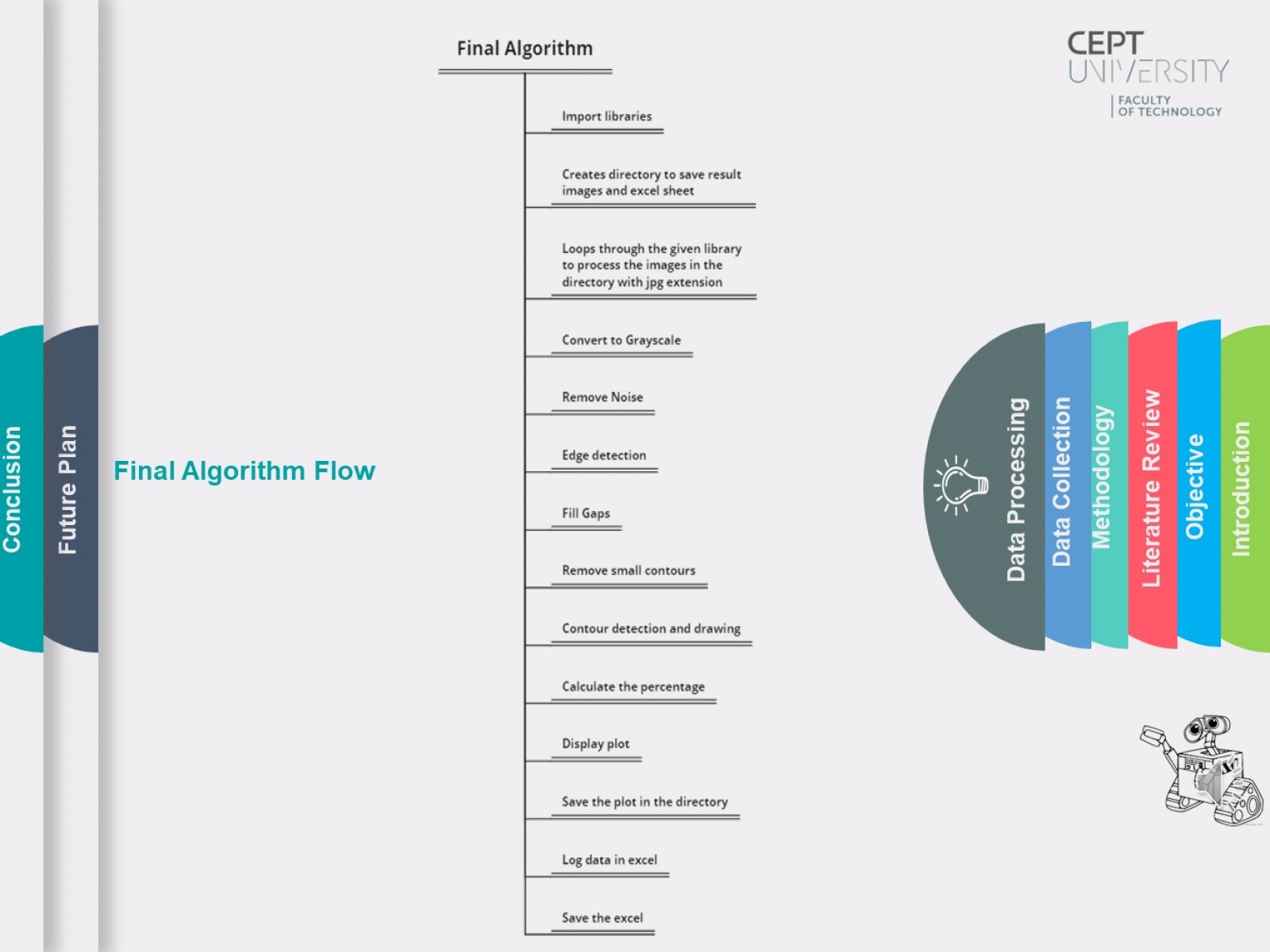
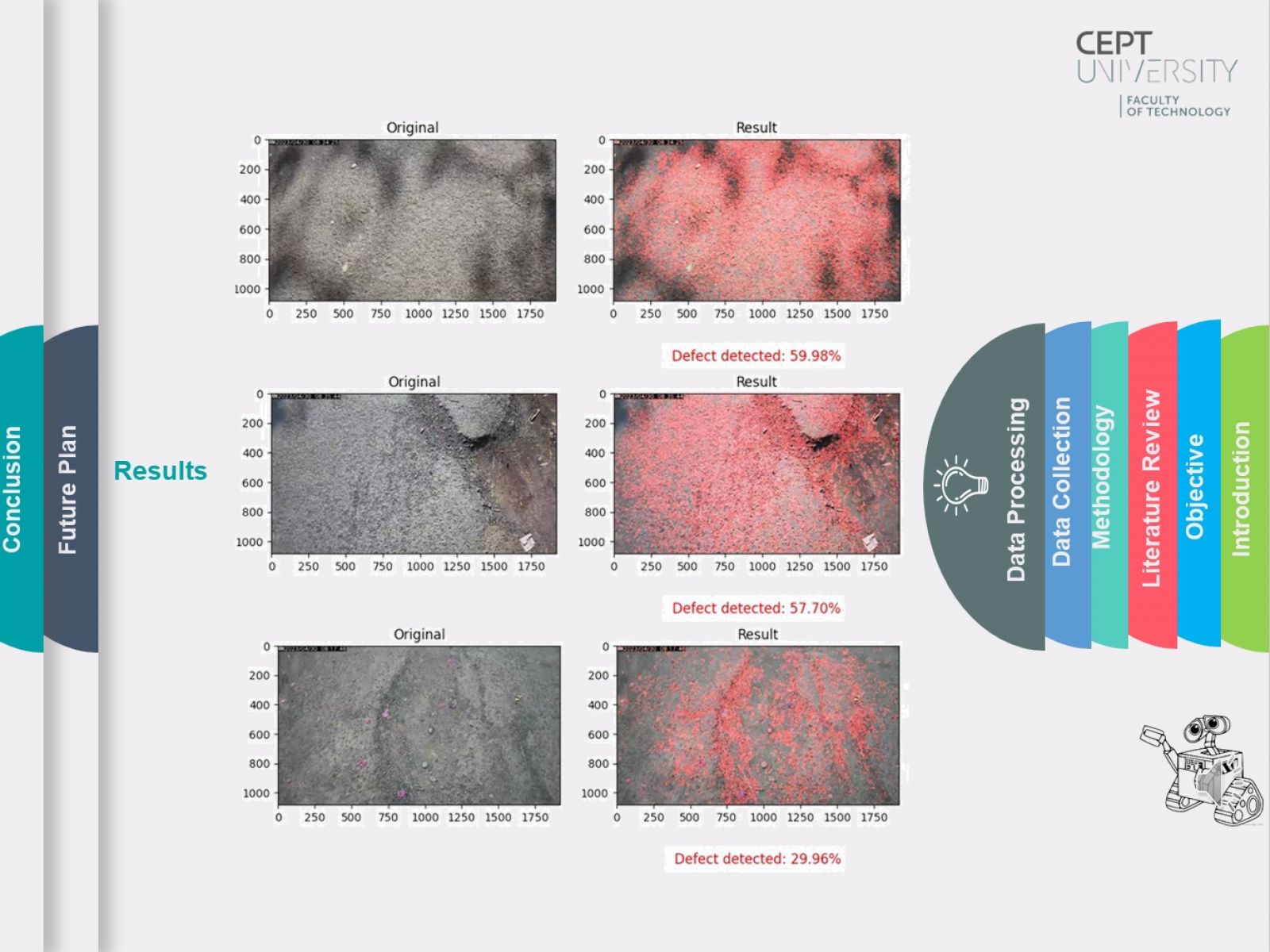
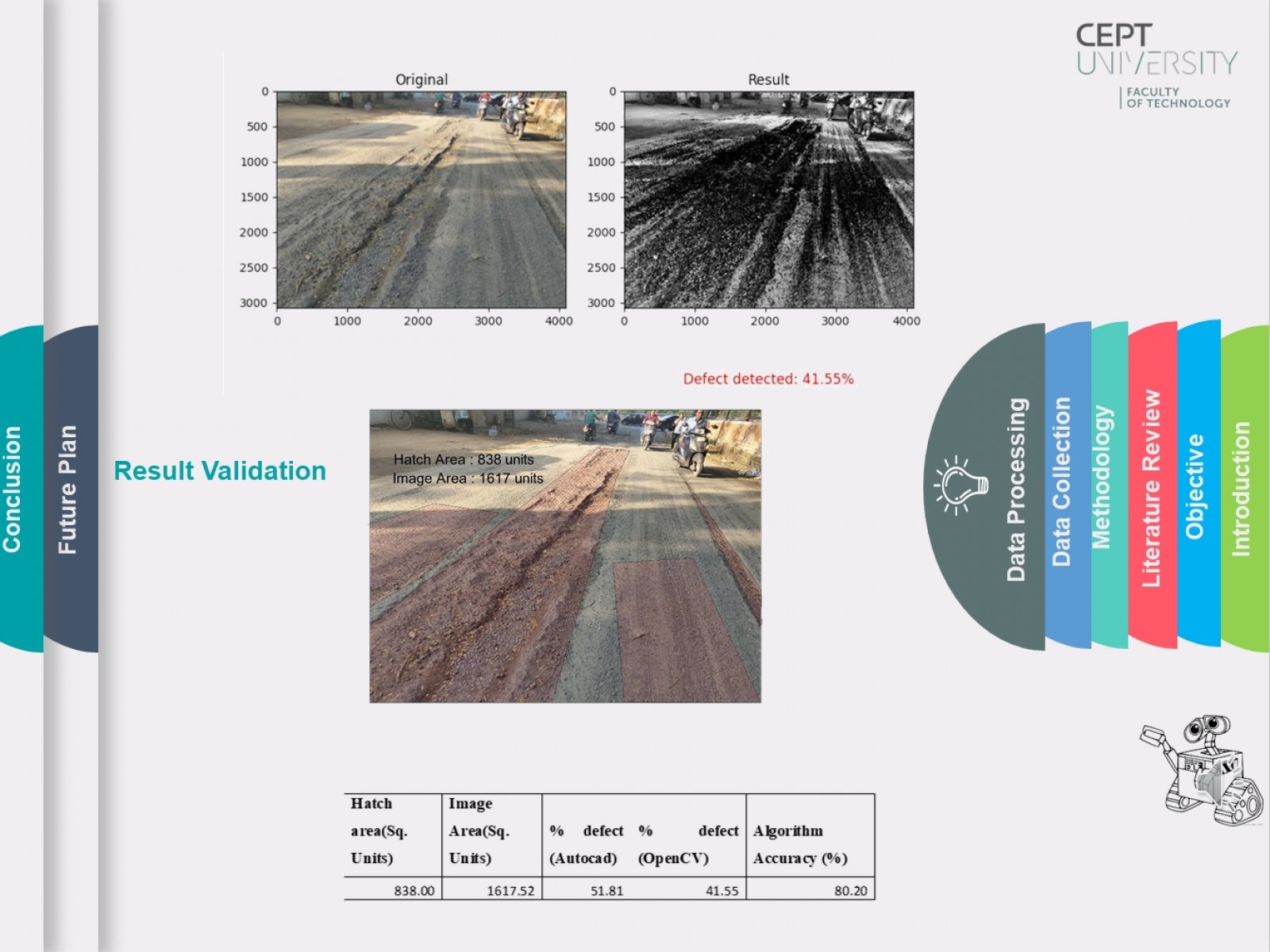
The main goal of this research is to design an automated robotic system that is capable of collecting photographs and videos of pavement defects. The collected data will be analysed using image processing methods implemented in Python, especially using OpenCV, to identify and evaluate pavement defects. Autonomous robots and cameras are used to collect data, with cameras recording images and videos of the road surface while autonomous robots use ultrasonic sensors to measure the depth of defects. The project outlines the entire process of creating an autonomous robots, including selecting the right cameras and solving problems encountered during data collection. The data processing part of the project involved developing a Python program to Analyse data collected by the rover. The program will use image processing techniques to detect pavement defects and the results will be evaluated to determine the severity of each defect. The results of the project could help pave the way for improved and more efficient pavement maintenance and repair by providing accurate and detailed information on pavement condition. Overall, this research represents a significant contribution to the field of robotics and image processing, demonstrating the data collection and analysis capabilities of this, as well as potential of these systems in improving infrastructure security and maintenance.