Your browser is out-of-date!
For a richer surfing experience on our website, please update your browser. Update my browser now!
For a richer surfing experience on our website, please update your browser. Update my browser now!
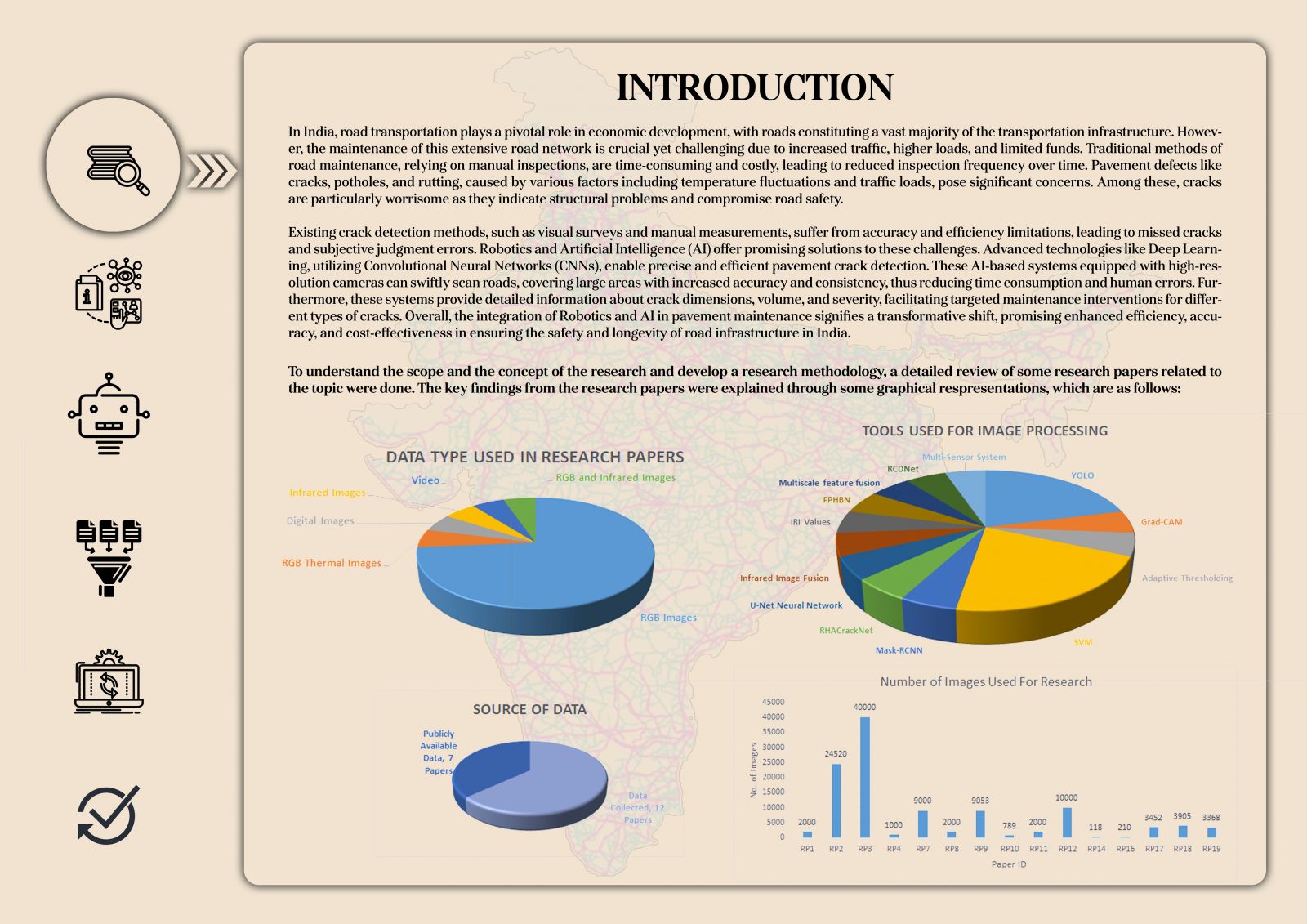
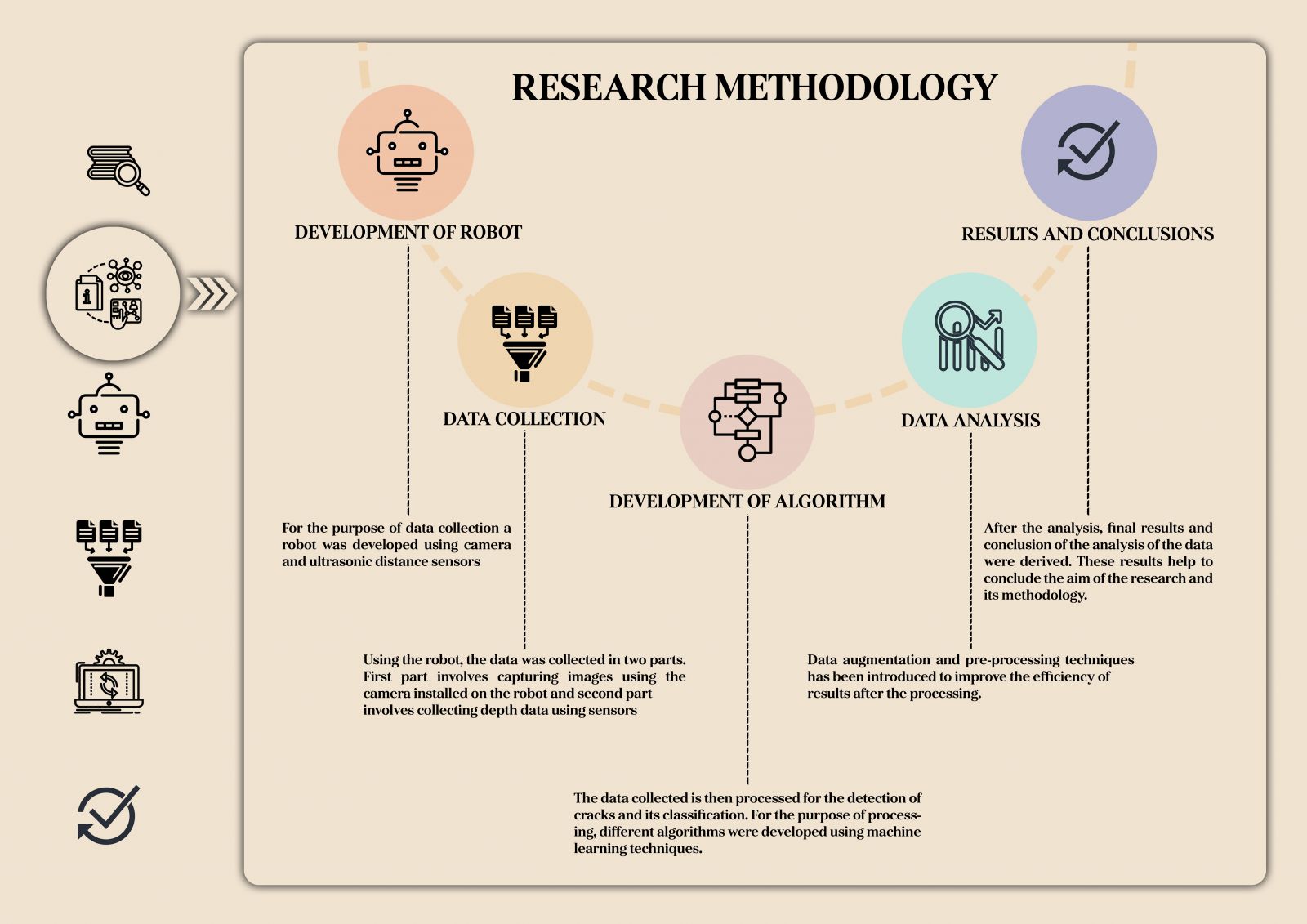
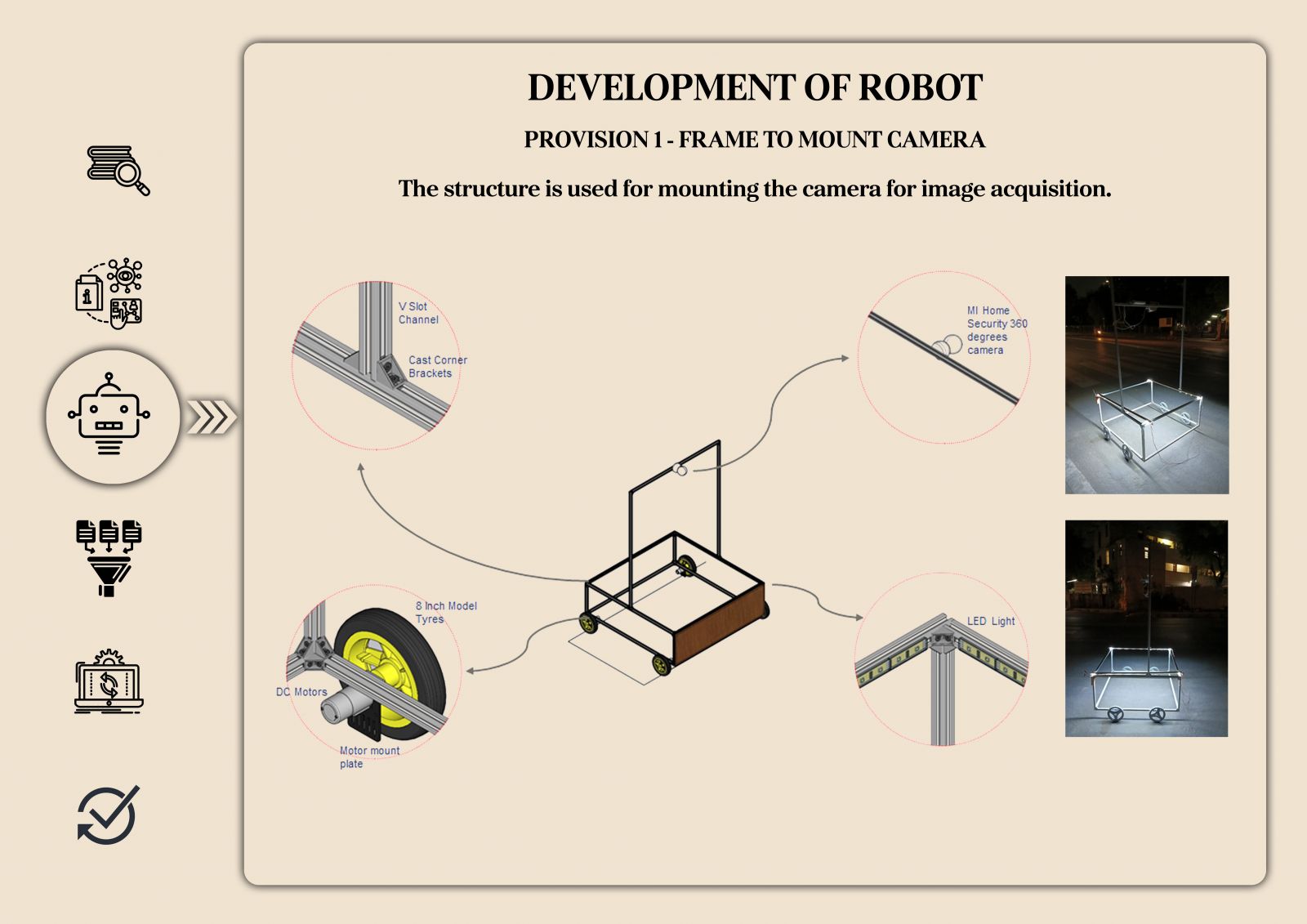
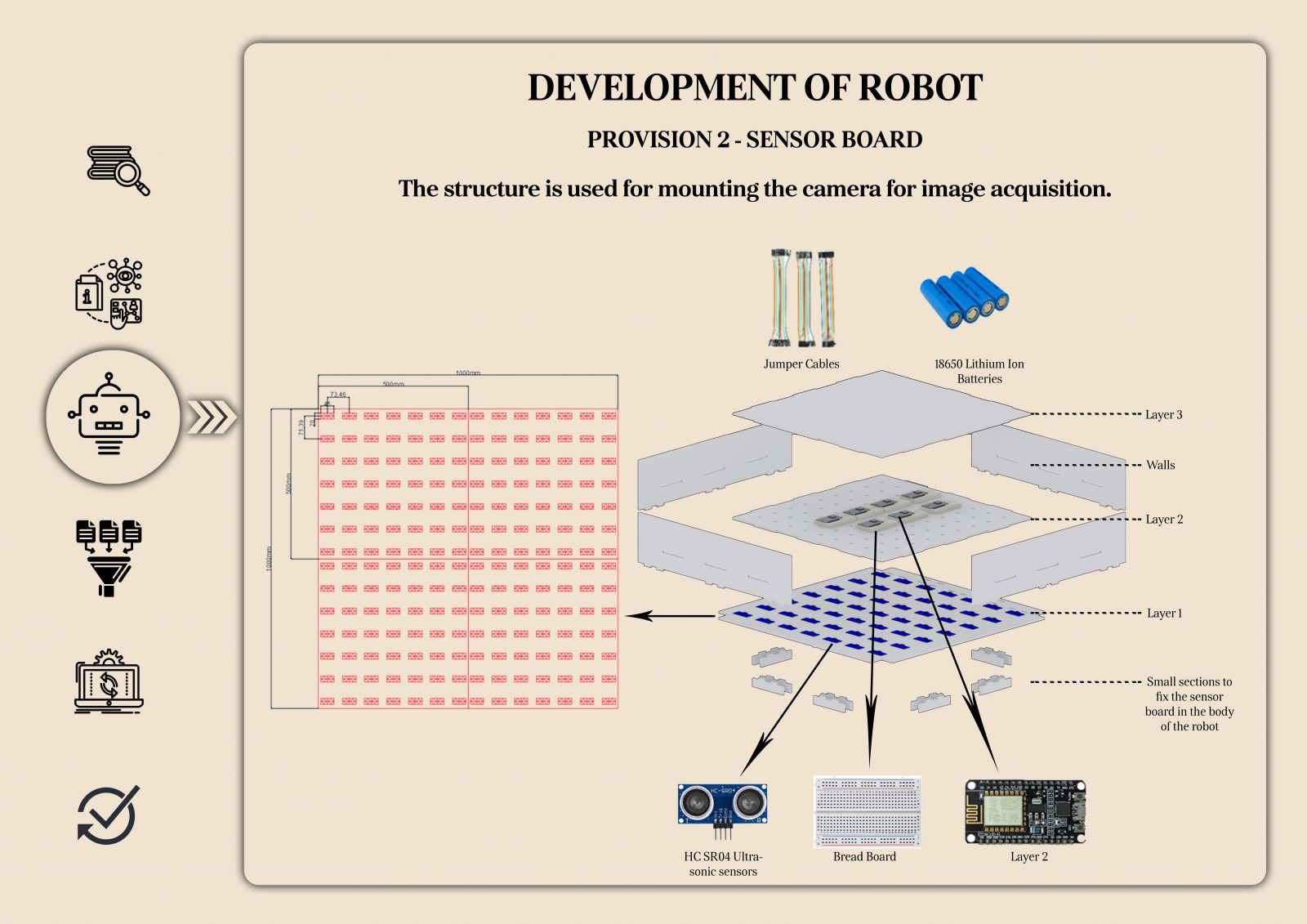
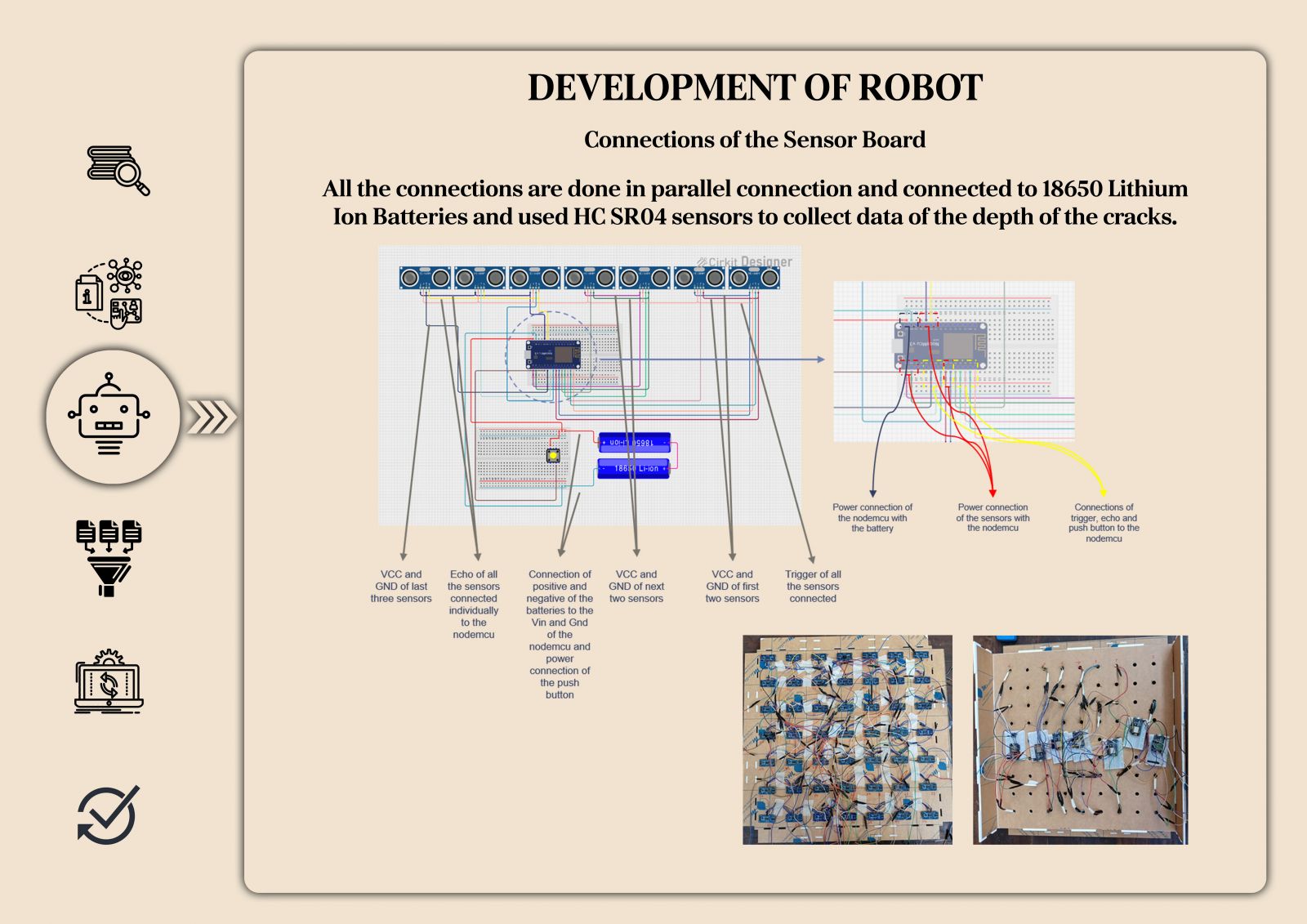
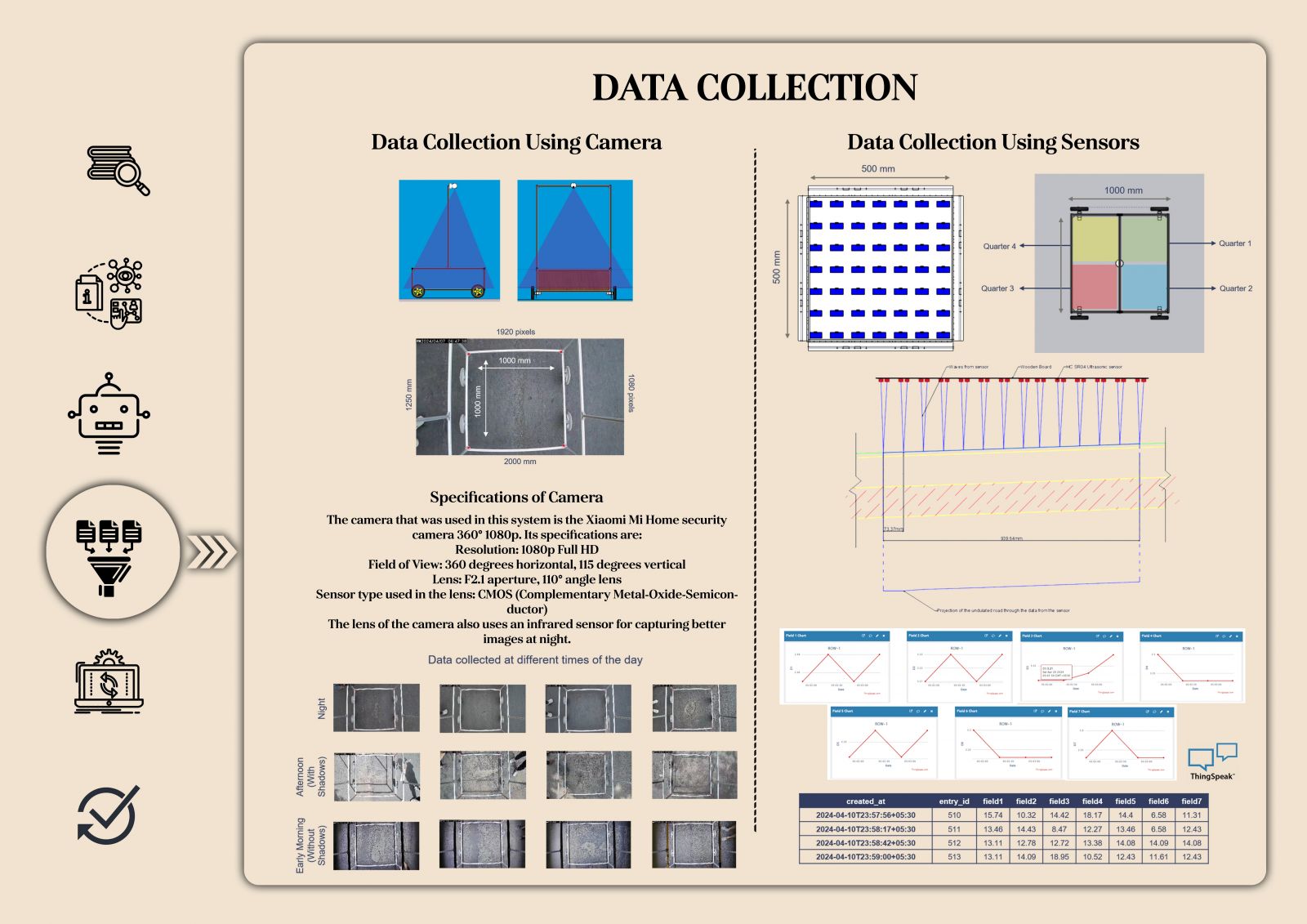
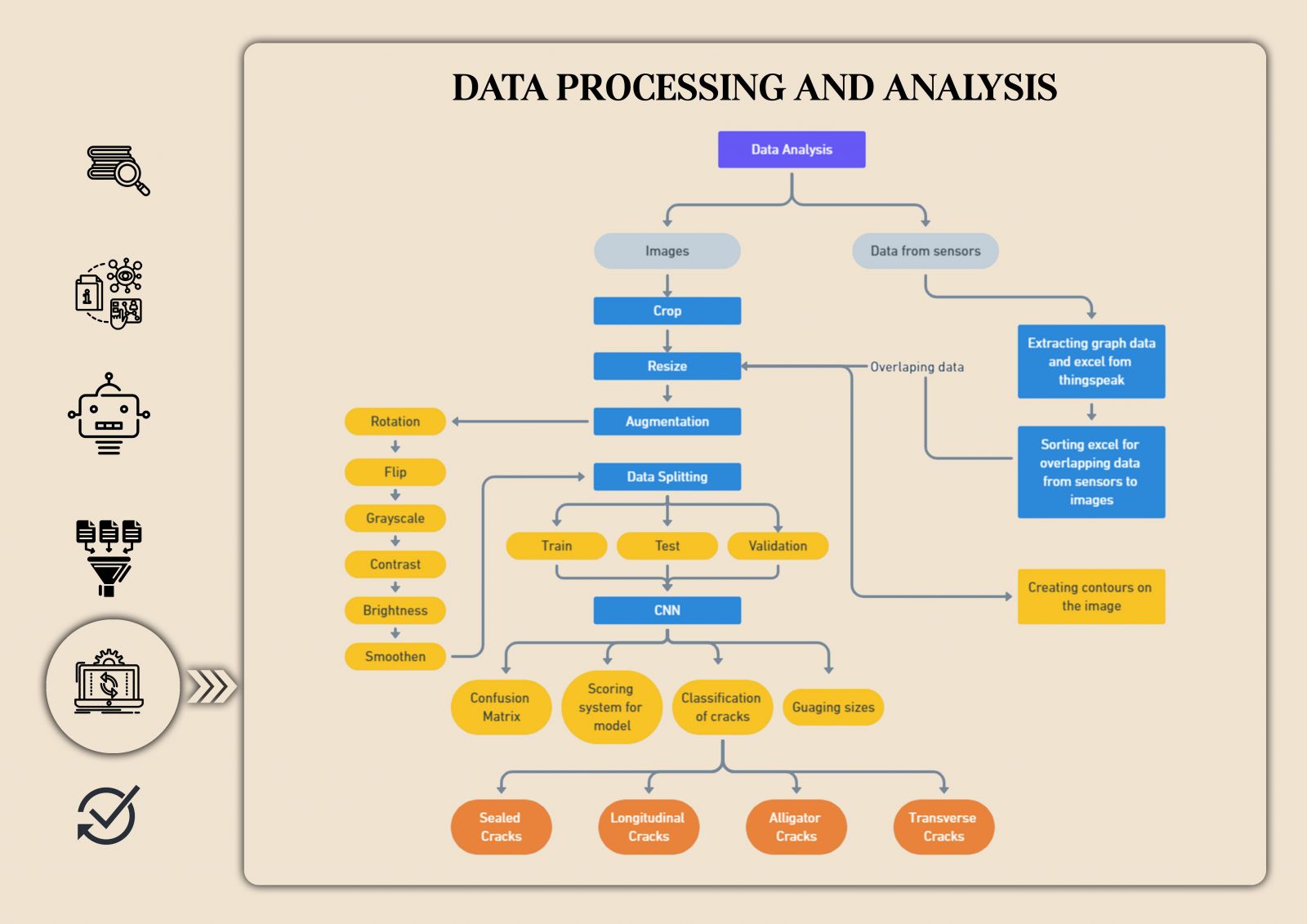
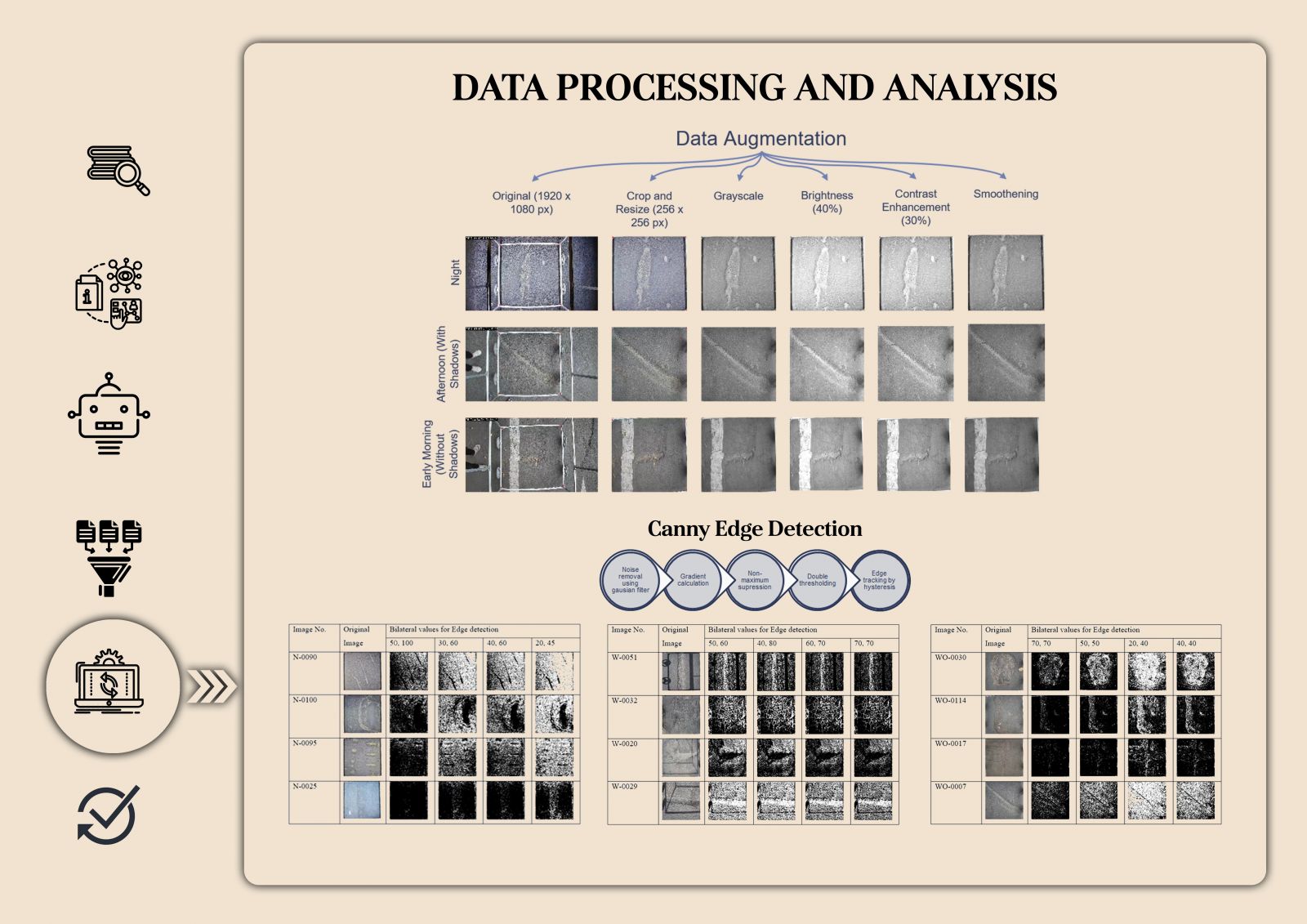
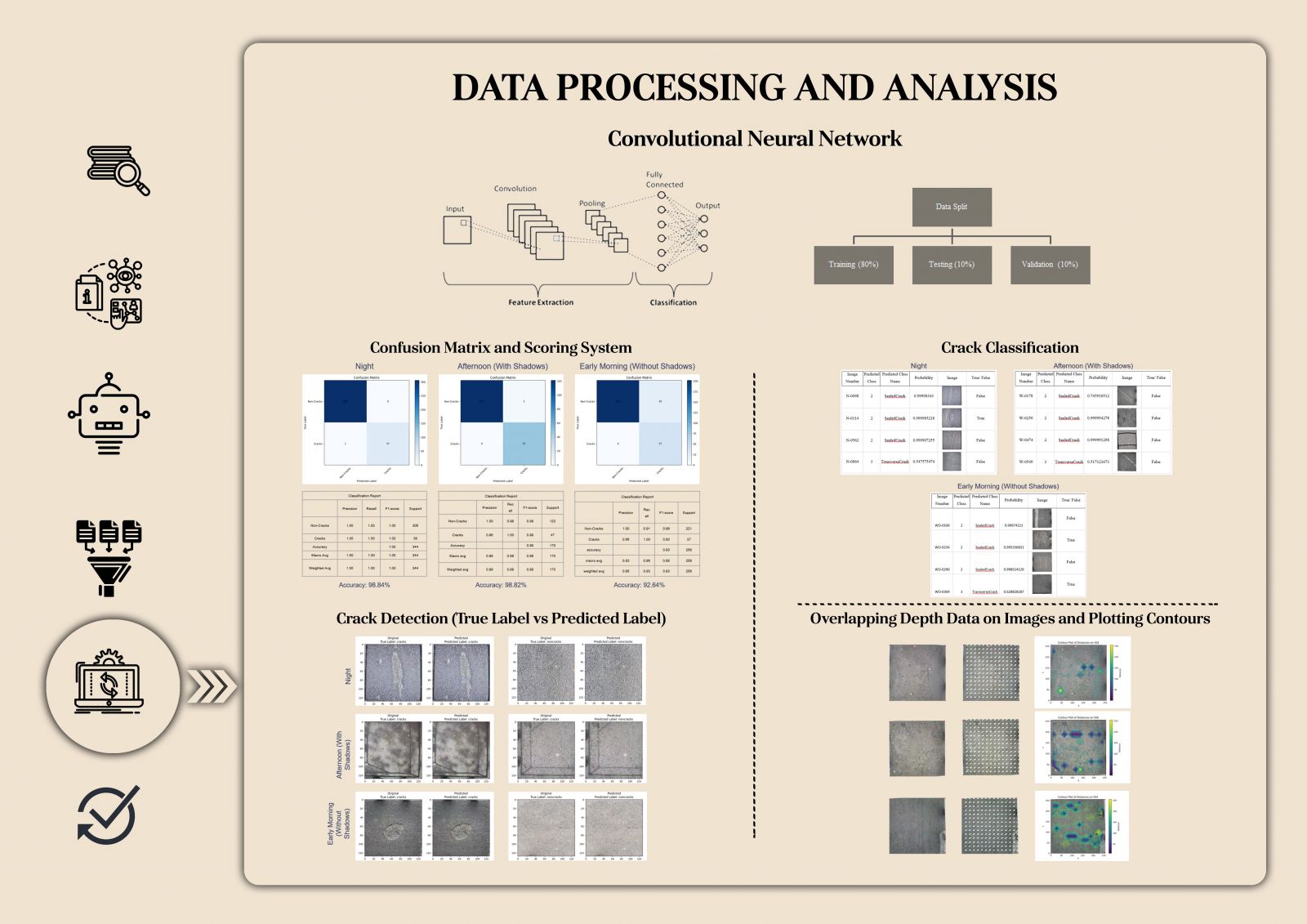
The main goal of this research was to develop a system that autonomously detects cracks on roads by giving information about the type of cracks and their depth. The design of the system was achieved in two parts, one for collecting images using a camera and one for collecting data about the depth of the cracks using ultrasonic distance sensors. The data from the camera was used for crack classification and data from the sensors was overlapped on the images to create contours of the cracks. Overall, this research is an integration of Robotics and AI, and Pavement Crack Detection.
View Additional Work