Your browser is out-of-date!
For a richer surfing experience on our website, please update your browser. Update my browser now!
For a richer surfing experience on our website, please update your browser. Update my browser now!
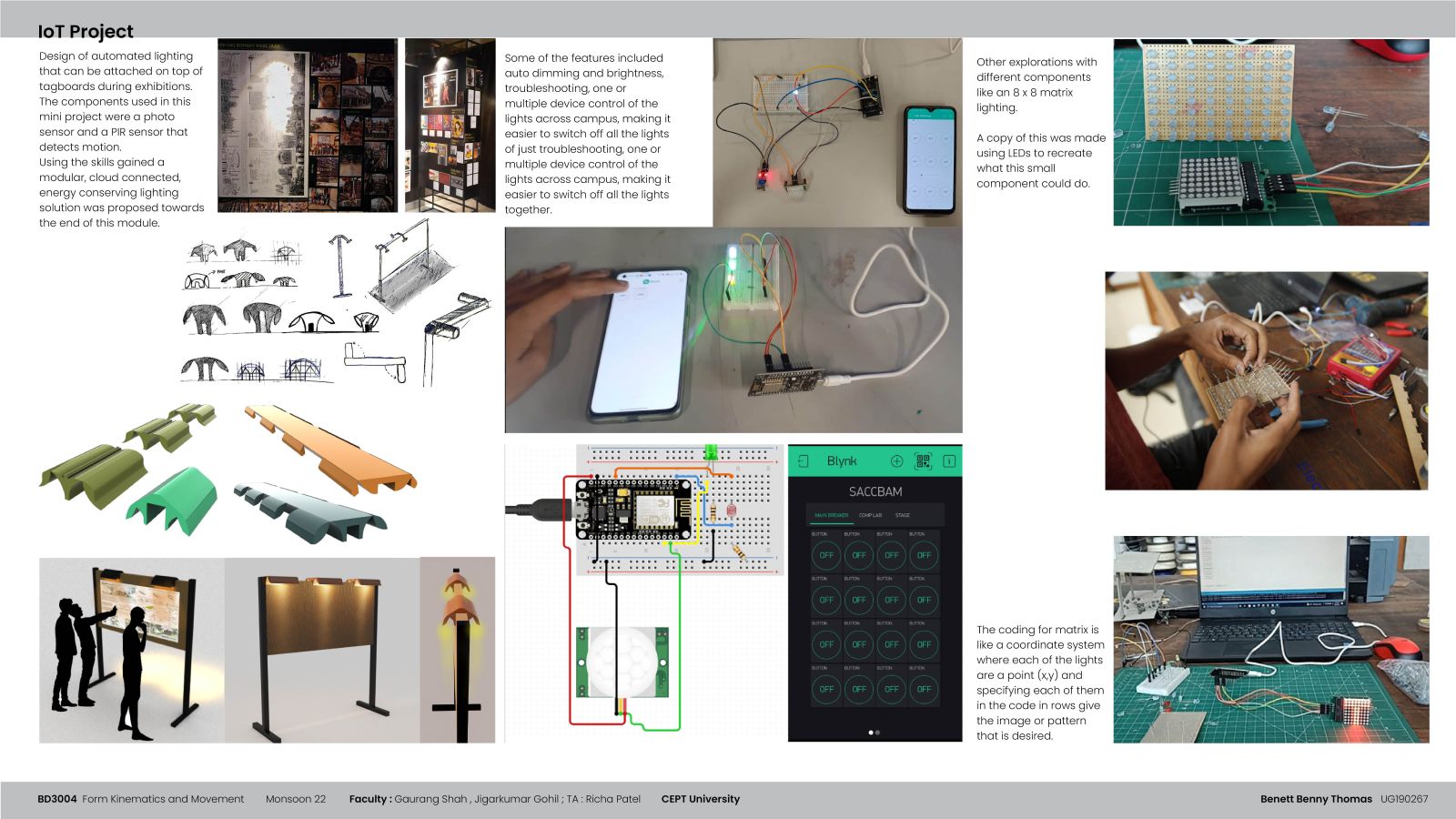
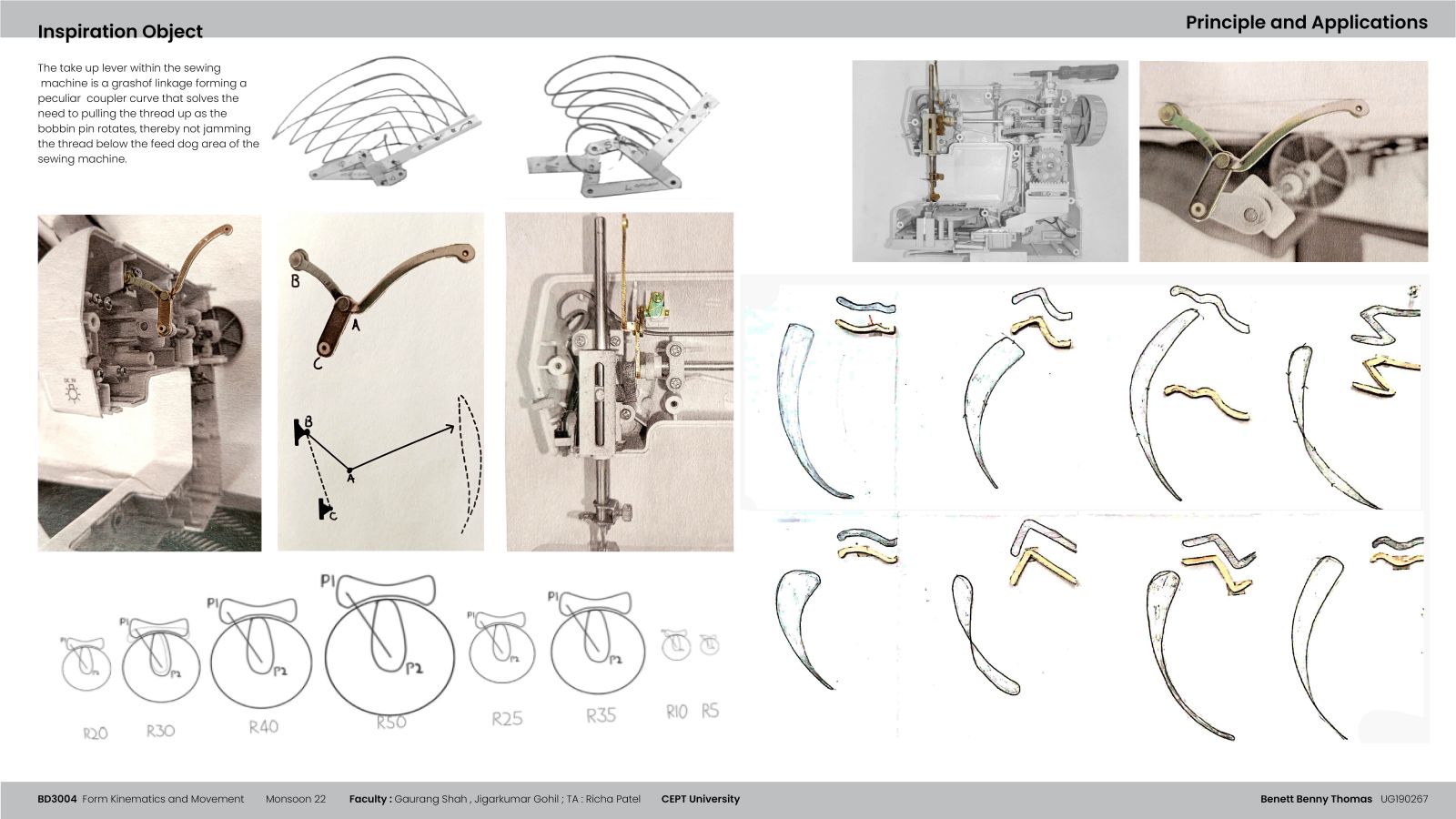
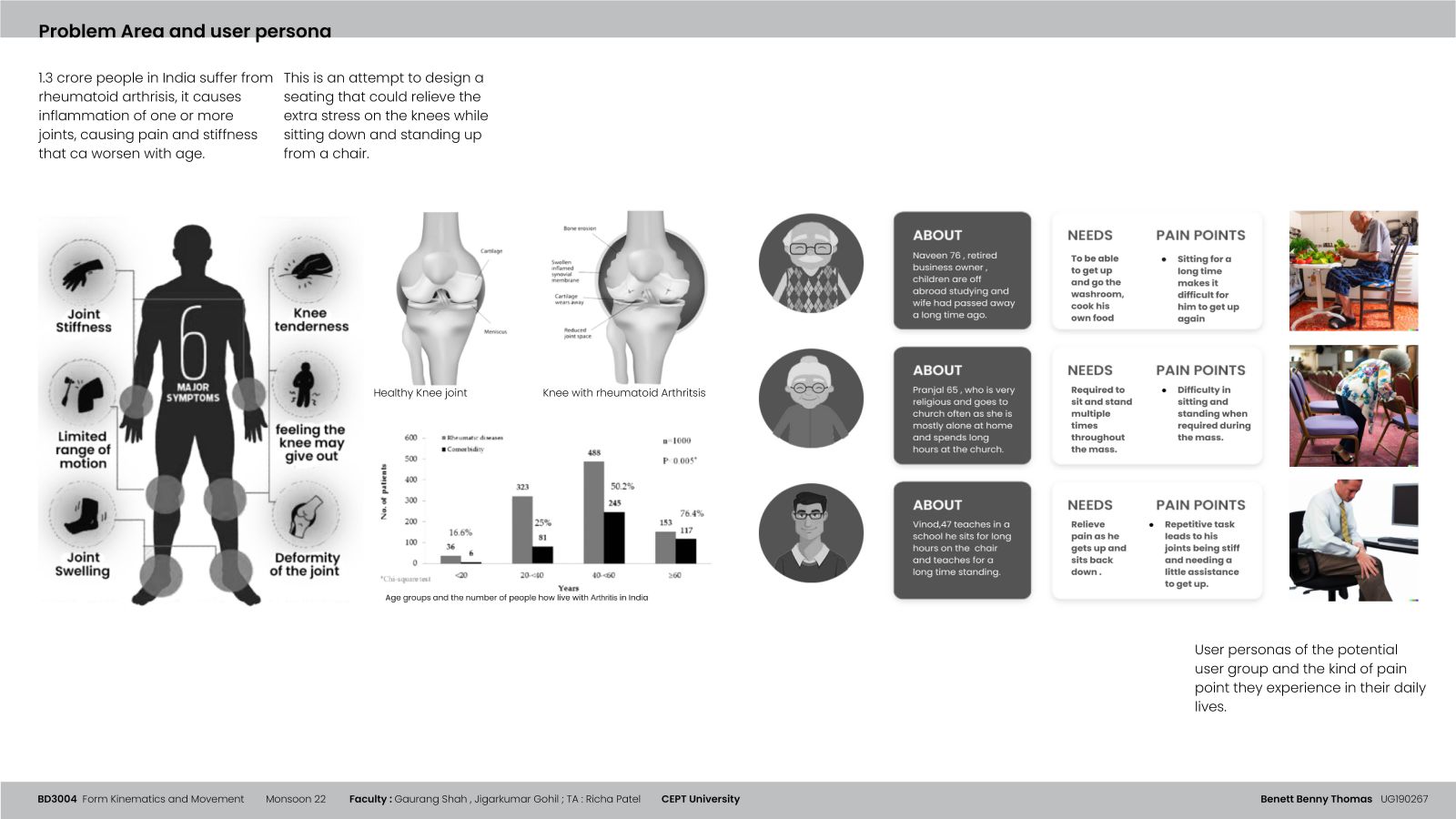
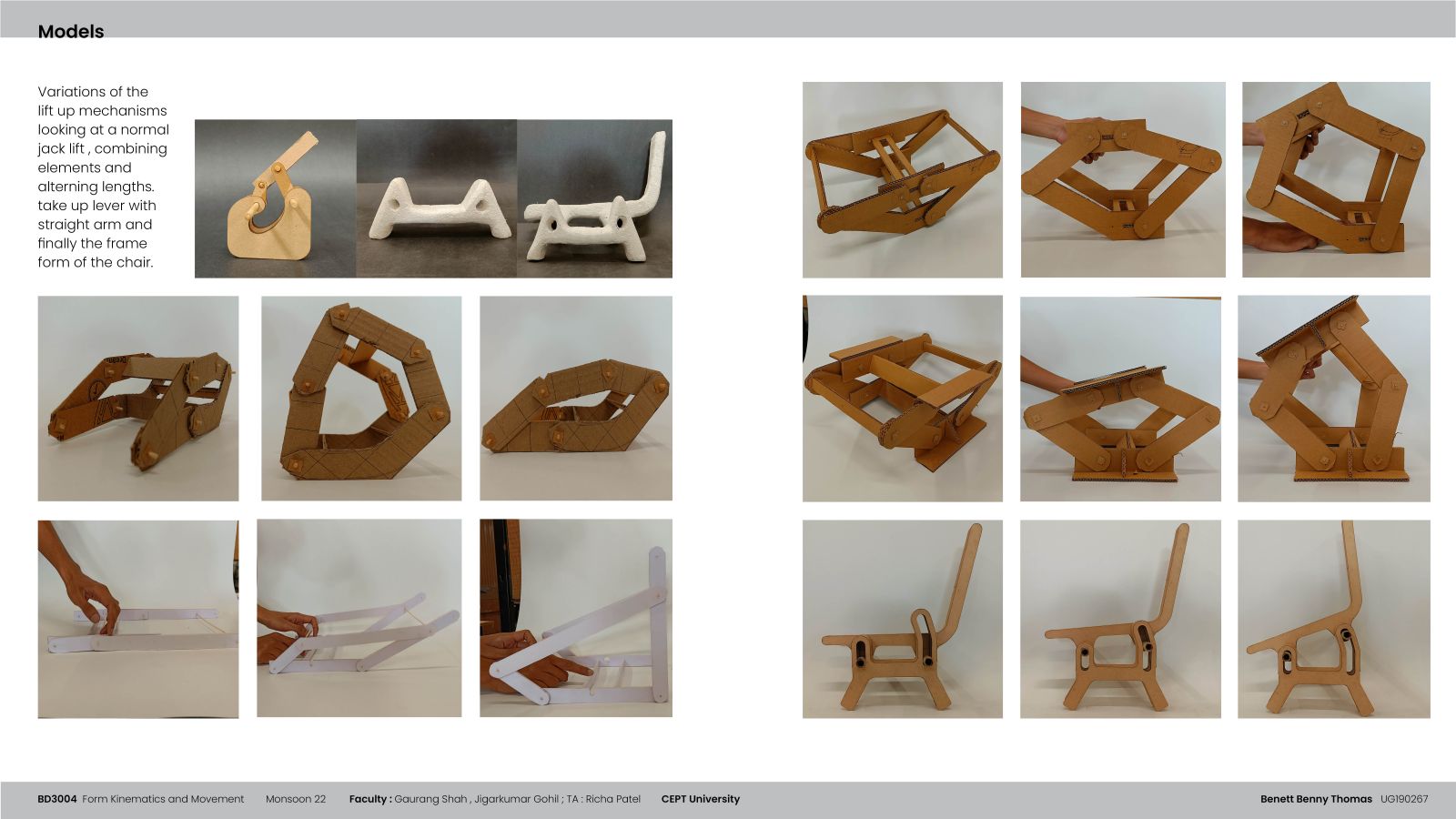
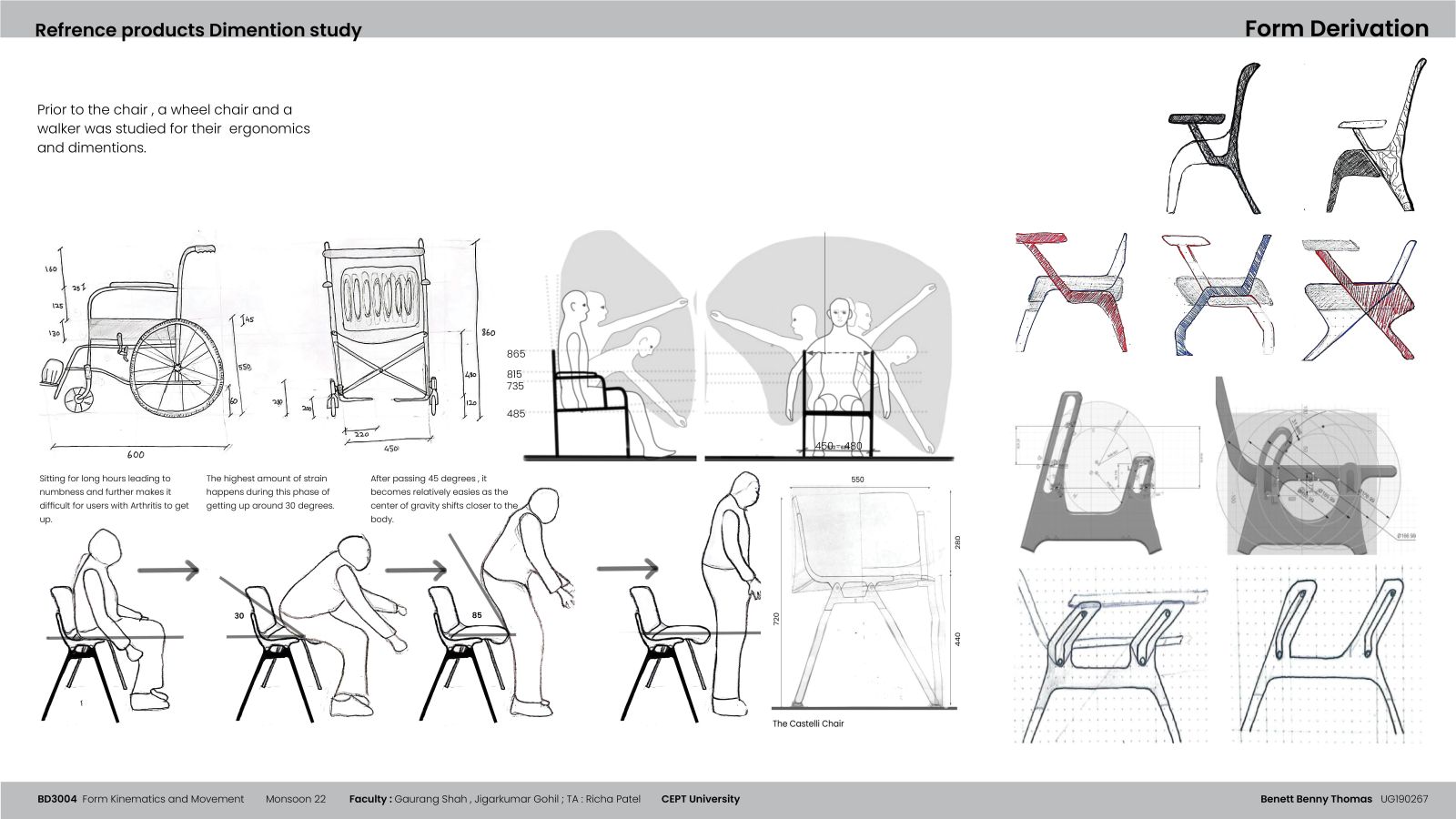
Starting with exploring the world of sensors, integrating them and being able to control them remotely with the help of IoT. The take-up lever within a sewing machine was studied to develop a product inspired by its principle. The product formed was an automated lift-up chair that could aid users with arthritis in getting up and sitting on a chair easier.