Your browser is out-of-date!
For a richer surfing experience on our website, please update your browser. Update my browser now!
For a richer surfing experience on our website, please update your browser. Update my browser now!
Space planning is a crucial part of the design that necessitates a lot of time, effort, and focus on the details. Errors, inaccuracies, and inefficiencies may result from the necessity to identify an ideal solution that satisfies the necessary spatial attributes. However, the procedure can be sped up using computational tools and algorithmic thinking, leading to more effective space configurations with the required spatial qualities.
This study emphasizes privacy as a crucial spatial quality for school design. It investigates various aspects and relevant physical factors that affect the level of privacy and creates an algorithm script that automatically develops space plans from a privacy perspective. The generated space plans are then subjected to comparative analysis to enable the designer to select the most appropriate configuration based on the required degree of privacy.
This research paper focuses on only primary schools among all institutional typologies.
Beyond efficiency, computational design has many advantages, such as multi-factor optimization, data-driven design, simulation, iteration generations, and analysis. These advantages allow designers to thoroughly and quickly examine and assess many design iterations. Integrating several parameters of physical privacy is made possible using computational tools, allowing designers to consider several factors simultaneously in creating space planning. Design solutions produced using this method are better optimized and more aligned with data-driven insights. Additionally, the computational approach offers many analysis tools to analyze all the iterations simultaneously and help identify the ideal solutions per the required degree of privacy.
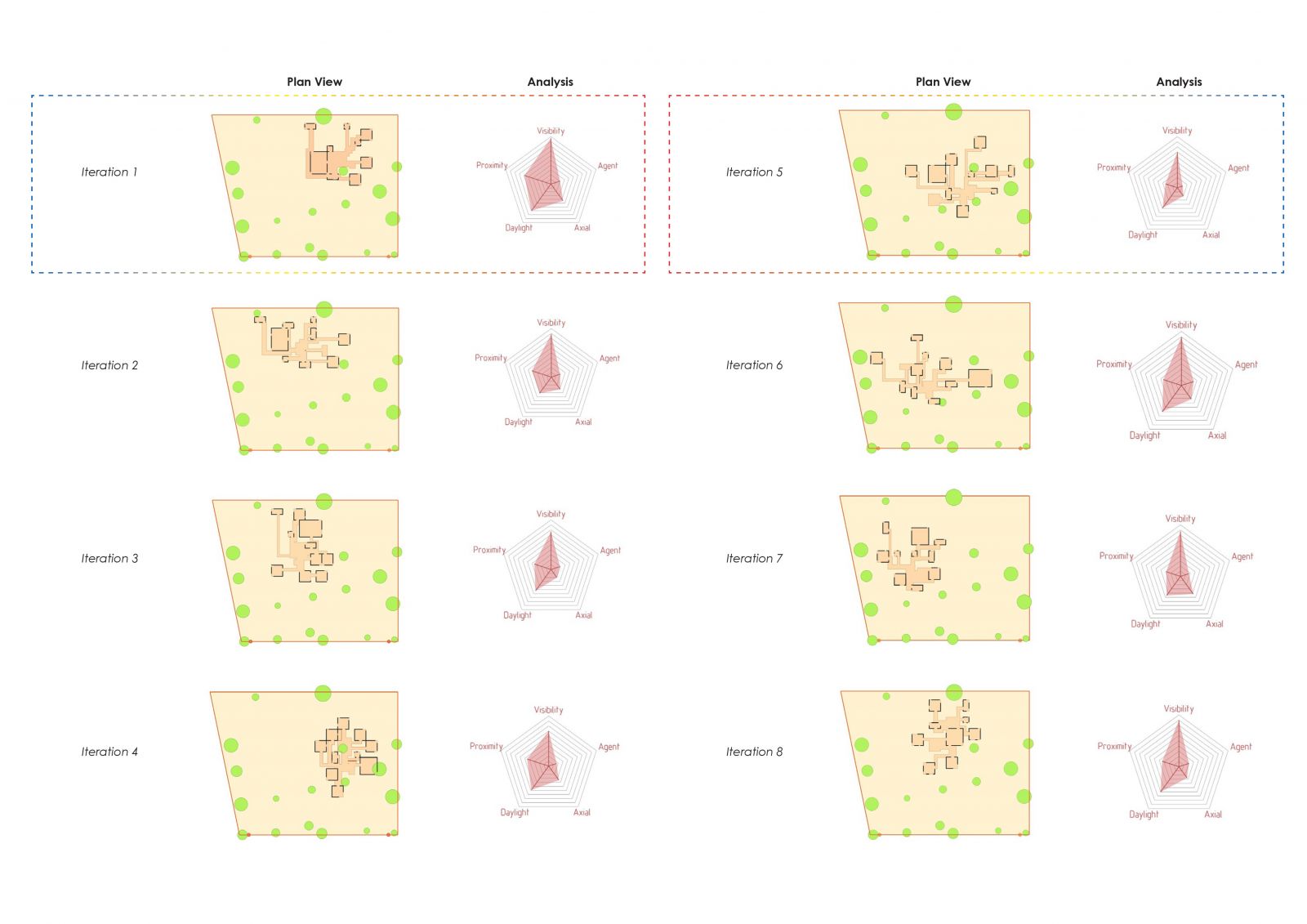
This research paper explores available computational tools and algorithmic experiment set-ups for generating space plans. It concludes with a comparative analysis of the computer-generated space configurations, which are the end products of all experiments. The flexibility of scripts allows designers to choose an ideal design solution from a range of iterations with varying privacy experiences.